感知
建图
使用激光雷达进行地图构建,主要尝试的算法有gmapping,cartographer
gmapping
roslaunch youbot_slam youbot_gmapping.launch
使用youbot_teleop_key进行键盘控制实现绘图
自主建图参考:https:blog.csdn.netBOSHEN97articledetails102584953
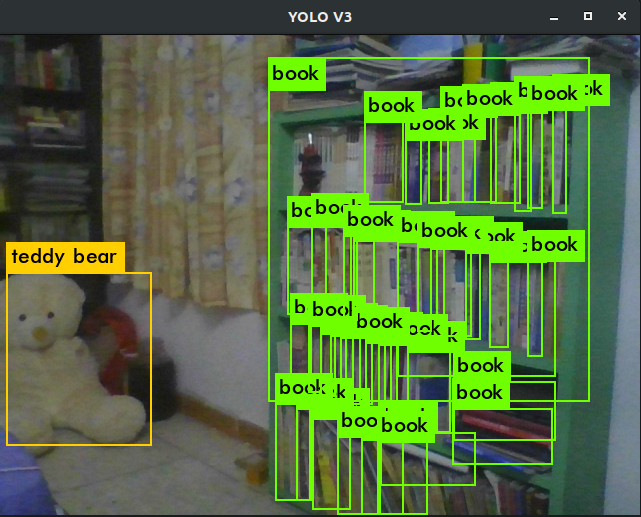
视觉识别
使用实时性和准确率较高的yolo算法进行目标检测、识别
darknet_ros的github地址:https:github.comleggedroboticsdarknet_ros
实现效果:
 |