规划
机械臂轨迹规划
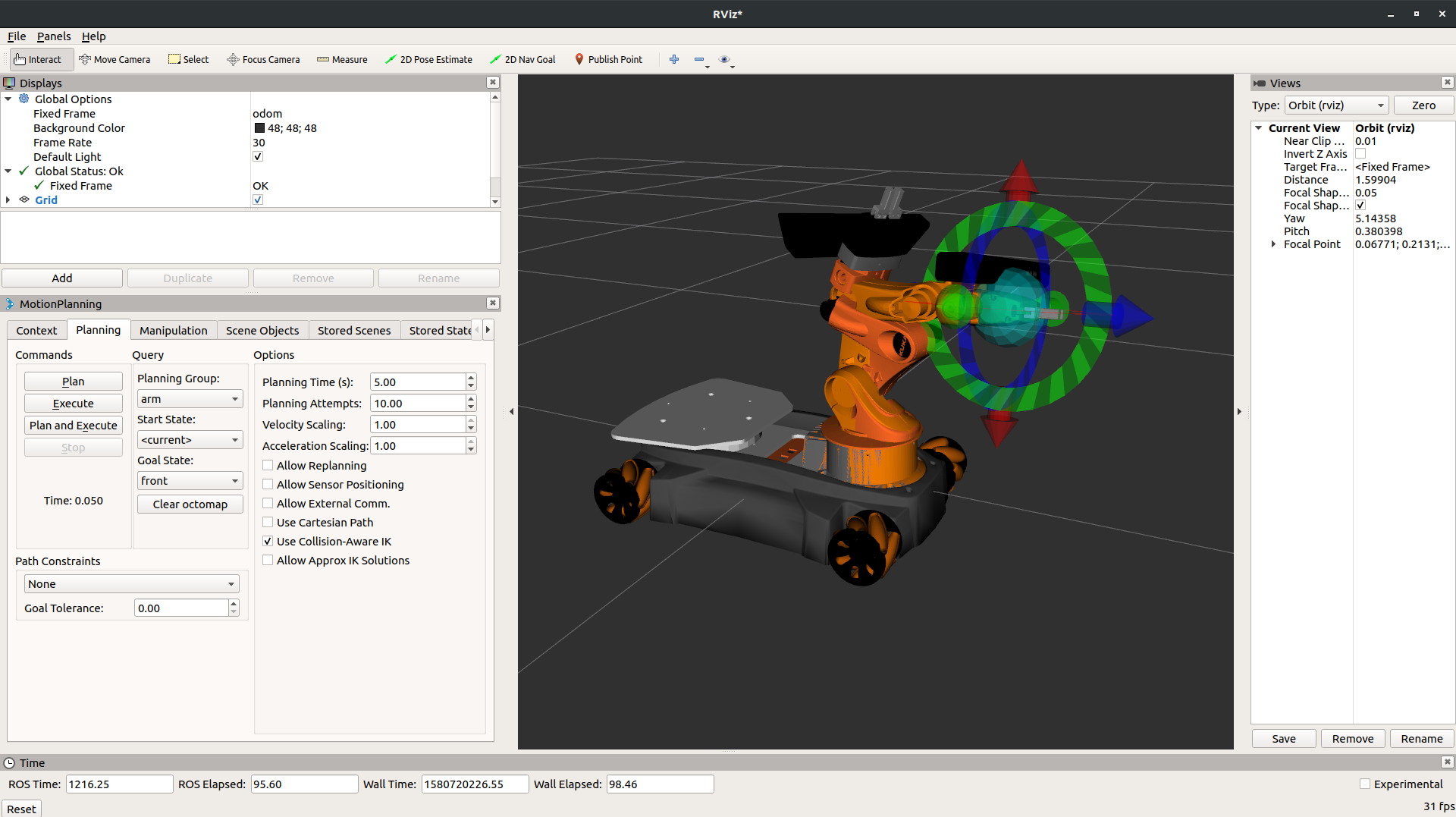
使用Moveit!进行轨迹规划。 使用方法:
roslaunch youbot_moveit_config move_group.launch
打开rviz即可进行机械臂轨迹规划。
 |
底盘路径规划
在仿真环境下可用youbot_teleop功能包使用键盘对机器人进行运动控制。
roslaunch youbot_teleop youbot_teleop_key.launch
规划机械臂轨迹规划使用Moveit!进行轨迹规划。 使用方法: roslaunch youbot_moveit_config move_group.launch 打开rviz即可进行机械臂轨迹规划。
底盘路径规划在仿真环境下可用youbot_teleop功能包使用键盘对机器人进行运动控制。 roslaunch youbot_teleop youbot_teleop_key.launch |