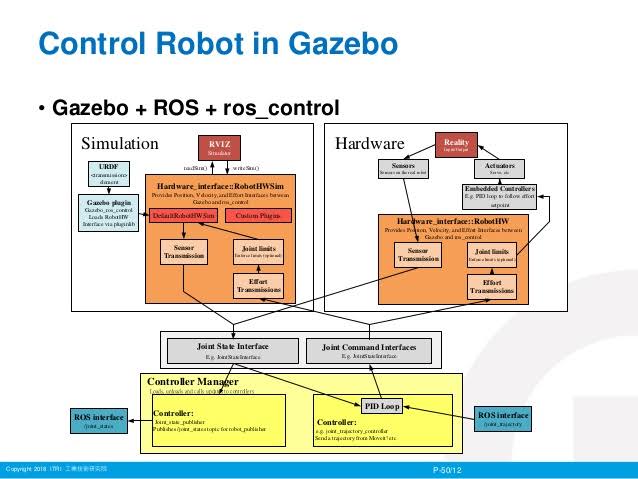
控制
 |
仿真中使用的ROS控制器配置文件位于youbot_gazebo_simulation/youbot_gazebo_control
主要参考有:
https:github.comyoubotyoubot_simulation
https:github.commas-groupyoubot_simulation
ros_controllers Wiki:http:wiki.ros.org/ros_controllers
controller_manager Wiki:http:wiki.ros.org/controller_manager
关于ros_control的参考博客:https:www.guyuehome.com/890?replytocom=49868
所有控制器及其状态:
 |
控制器的类型:
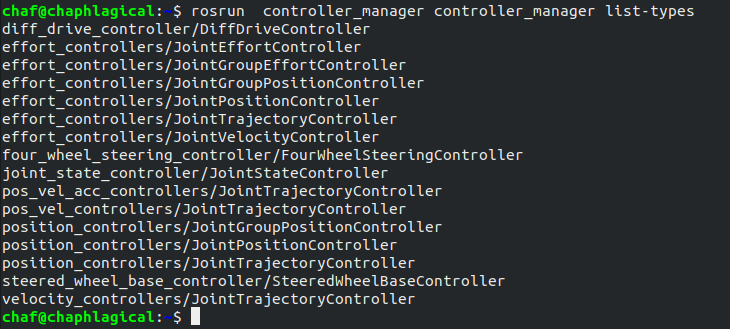 |