守恒量
所谓力学量,是系统状态参量的函数: Γ(q,q˙,t)。若一个力学量 Γ=Γ(q,q˙,t) 不随时间变化,即 Γ 对时间的全导数为零:
dtdΓ=0
那么称 Γ 为运动常数,或者运动积分,其值由初始值决定,即 Γ(q,q˙,t)=Γ(q(0),q˙(0),0) .
对于一个自由度为 s 的体系,最多有 2s 个守恒量,这其中最多有 2s−1 个不显含时间 t 的守恒量。
例如,对阻尼振动的动力学方程左右直接对 t 积分一次:
Γ′=∫t0t(x¨+2γx˙+ω2x)dτ=x˙(t)+2γx(t)+ω2∫t0txdτ
就会给出一个形式比较奇怪的一个守恒量,它对时间 t 的导数的确是 0,它的值不随时间变化。
运动积分的存在性是很显然的,但是我们更关心的是这些积分是否能够与现实世界具有一定物理对应,即物理意义。比如:
- 在拉格朗日函数不含其中一个广义坐标时,与之共轭的广义动量守恒
- 如果拉格朗日函数不显含时间,则方程的能量守恒
这些结论使用拉格朗日方程很容易给出证明,但本节将试图通过一种更迷人的方式去理解它们:通过考察体系是否具备某种对称性来分析相应的力学量是否为运动常量。
对称性
对称操作
对于一个变换,我们可以有两种看法,即被动的观点和主动的观点。对某个坐标系下的一些点做变换,我们既可以认为是点的位置变了而坐标系没变,也可以认为是点的位置不变而换用了新的坐标系。
对称性,描述了变换下的不变性。若某种事物或性质在变换前后是不变的,那么它就具有某种对称性。比如球体绕任意过直径的直线旋转都不会发生变化,那么它就有旋转对称性;再比如物理实验不论在何时进行,只要条件相同,都能得到同样的结果,这说明物理规律有时间平移对称性。
对于一个标量场 φ ,场中的每一点 P 都对应一个标量 φ(P) . 当场中的每一点 X 变换到新的点 X′=λX ( λ 为变换矩阵)时,我们得到新的场 φ′ ,且有 φ′(X′)=φ(X) .
从被动的观点看,有 φ′(X′)=φ(X)=φ(λ−1X′) .
从主动的观点看,有 φ′(X′)=φ(X)⟹φ′(X)=φ(λ−1X) .
若有 φ′(X′)=φ(X′) 即 φ(λX)=φ(X) ,则称 φ 在变换 λ 下是不变的(对称的), λ 称为 φ 的一个对称操作。
以下讨论均采用主动的观点。
单参数点变换
例子
为了使得我们的抽象的讨论能落到实处,不妨考虑这样一件事:拉格朗日函数其实在相空间中定义了这样一张曲面,比如一维自由粒子的拉格朗日函数为
L=21mx˙2
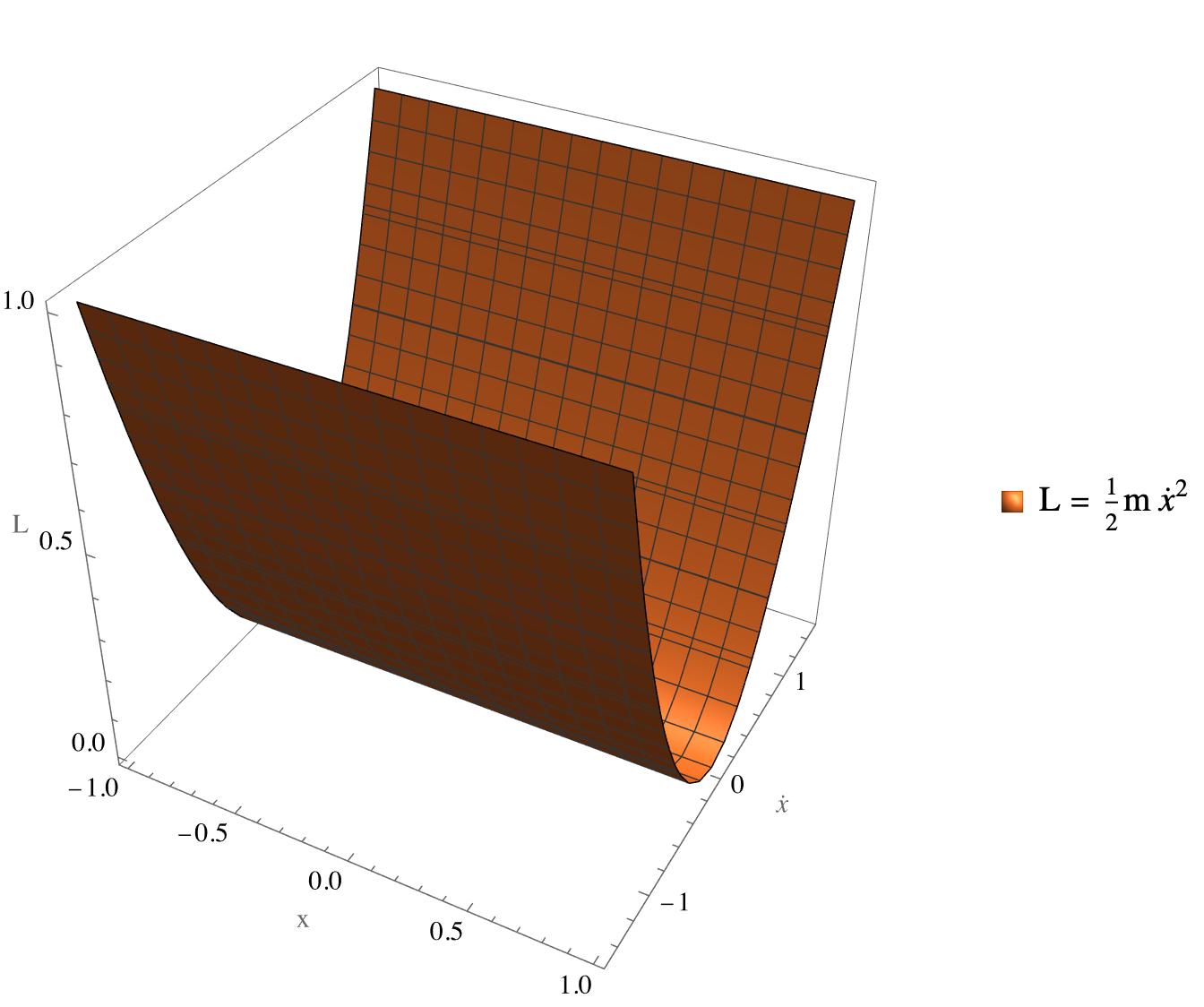
而变换 x↦X=x+ϵ 就是沿着 x 轴的“一小步”,这样的点变换,无论发生在曲面上哪里、 无论ϵ 大与小,都保持了这个拉格朗日函数的取值不变。所以变换实际上也不是任意取的,是根据拉格朗日函数的对称性来取的。
那么这样一来,“L(q,q˙,t) 中不含有其中一个广义坐标 qk 时,它对应的广义动量 pk 守恒”这件事的几何含义非常好理解:“L(q,q˙,t) 中不含有其中一个广义坐标 qk ”意味着 L 沿着 qk 轴扫出一个柱面,而“对应的广义动量 pk 守恒”则表明 $ \frac{\partial L}{\partial \dot{q}} = p_k $ 是常数——扫出的是柱面,偏导数当然是常数了。
再比如,一维阻尼振子的拉格朗日函数为
L=e2γt(21mx˙2−21mω2x2)
此时的相空间需要引入时间 t,即时间也需要成为一个更加广义的广义坐标:
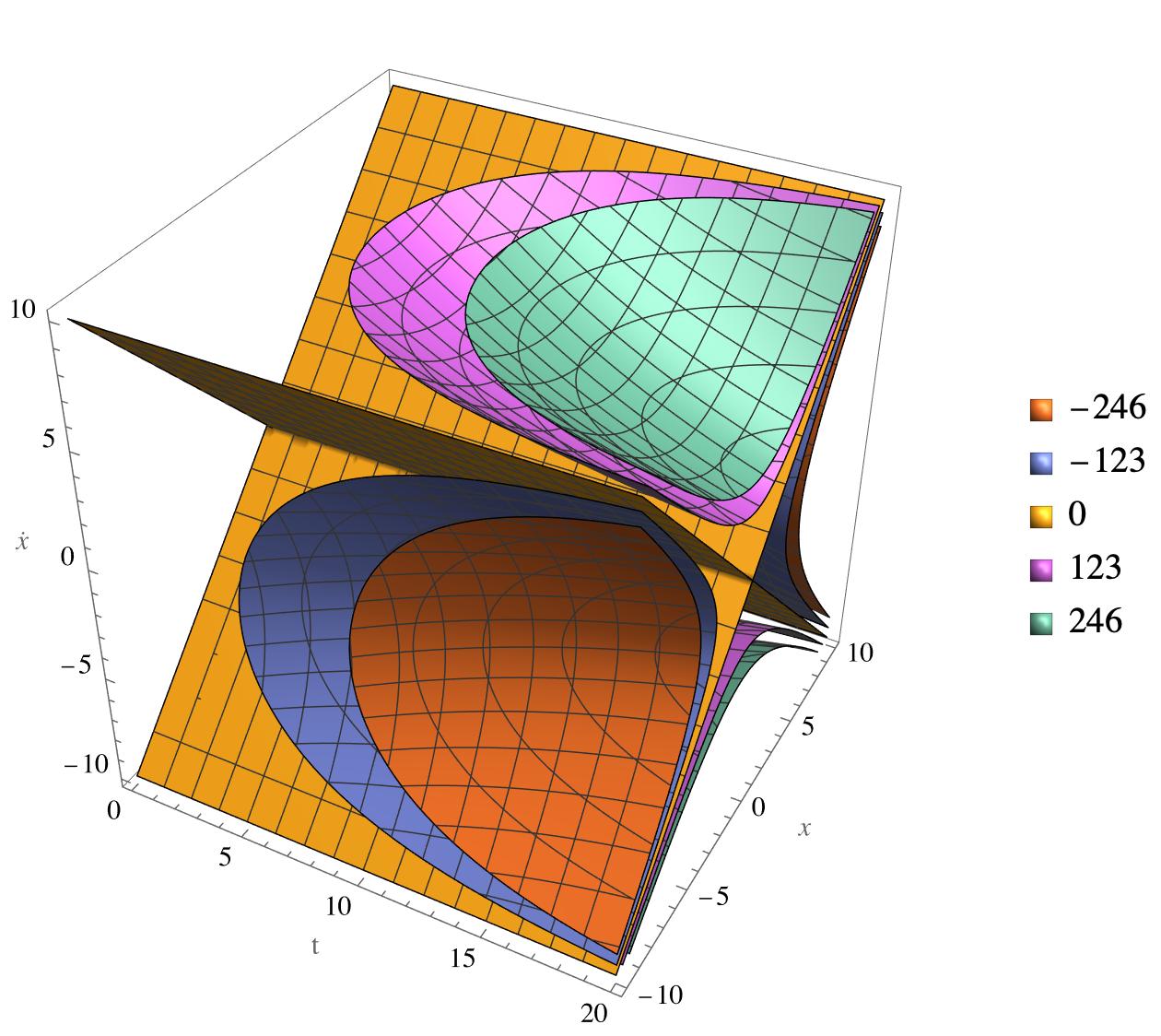
如果做这样一个变换:
x↦X=xeϵγt↦τ=t−ϵ
显然也是一个使得拉格朗日函数数值不变的变换,是在等值面上的一个“滑动”。
构造守恒量的预备工作
我们对力学体系的广义坐标做变换 Q:qk↦Qk=Qk(q,t;ε) ,其中 ε 可连续取值,且当其取到某个值的时候变换 Q 为恒等变换。不妨设这个值为 0 ,即
Qk∣∣ε=0=qk
由此可知
q˙k↦Q˙k=∂qi∂Qkq˙i+∂t∂Qk=Q˙k(q,q˙,t,ε)
令 ε→0 ,可做泰勒展开,取一阶近似,有
qk↦Qk=qk+εSkq˙k↦Q˙k=q˙k+εS˙k
其中
Sk=∂q∂Qk∣∣ε=0=Sk(q,t)
动力学对称性
一个动力学体系的拉格朗日函数是广义坐标、广义速度和时间的函数,即 L=L(q,q˙,t) . 我们把点变换后的新广义速度、广义加速度以及时间带入其中,给出新的函数 Lε 的定义,新的函数可以仍然是 q,q˙,t 的函数。即
Lε(q,q˙,t)=L(Q,Q˙,t)=L(Q(q,t,ε),Q˙(q,t,ε),t)
若在此单参数点变换下 L 具有规范不变性,即
Lε(q,q˙,t)=L(q,q˙,t)+dtdF(q,t,ε)
那么此系统有动力学对称性。
令 ε→0 ,可做泰勒展开,取一阶近似有
Lε=L+εdtdG
其中 G=∂q∂F∣∣ε=0=G(q,t) .
空间变换的 Noether 定理
若变换 qk↦Qk=Qk(q,t,ε) 为体系 L(q,q˙,t) 的对称变换,即
Lε(q,q˙,t)=L(Q,Q˙,t)=L(q,q˙,t)+dtdF(q,t,ε)
则 Γ=pkSk−G 为运动常数,其中
Sk=∂ε∂Qk∣∣ε=0,G=∂q∂F∣∣ε=0,pk=∂q˙k∂L
Noether 定理即是说,若我们能找到一个对称变换,就说明体系有一个对应的运动常数。对称与守恒由此联系起来。
由 Noether 定理可以得到很多常见的守恒关系。例如由空间平移可以得到动量守恒,由空间转动可以得到角动量守恒。
时空联合变换
让时间成为广义坐标
前面我们只是将空间变来变去,根据空间平移不变性以及空间转动不变性分别找到了线动量 p 和角动量 l 这两类守恒量。现在,我们希望能将时间 t 纳入变换中,找到更多的守恒量。
然而,作用量的表达式中,被积变量就是时间 t ,如果对时间做一个变换,比如平移 τ=t+ϵ ,则会导致积分上下限改变,难以进一步讨论(比如写出新的拉格朗日方程):
S=∫τ1−ϵτ2−ϵL(q,q′,τ+ϵ)dτ
其中 q′ 代表 dq/dτ,而 q˙ 代表 dq/dt。
为了使得对时间做变换时,作用量的积分上下限不变,进而将时间 t 也在形式上作为一个新的广义坐标参与到讨论之中,我们考虑用参数变换(实际上是相对论的原时)t=t(σ):
S=∫t1t2L(q,q˙,t)dt=∫σ1σ2L(q,q˙,t)t′dσ
并且有
q˙=dtdq=dt/dσdq/dσ=t′q′
则令
L^=t′L(q,q˙,t)=t′L(q,t′q′,t)=L^(q,t,q′,t′)
作用量现在可以写成
S=∫σ1σ2L^(q,t,q′,t′)dσ
新的拉格朗日函数被积变量是 σ ,现在时间 t 就称为了一个更加“广义”的广义坐标。
新的广义动量